Onpage keywords chain search with * wildcard.
Example: sear* my nam* will find Searh my names and search my Name

|
|
| (не показані 3 проміжні версії цього учасника) |
| Рядок 61: |
Рядок 61: |
| | init_graph( g_p ); | | init_graph( g_p ); |
| | dfs( g_p, 0, 5 ); | | dfs( g_p, 0, 5 ); |
| − | destroyGraph( g_p );
| |
| − | return 0;
| |
| − | }
| |
| − | </nowiki>
| |
| − |
| |
| − | == Пошук з обмеженням глибини ==
| |
| − | [[Файл:Depth_limited_search_flow.png|300px|thumb|right|Порядок виконання пошуку з обмеженням глибини 2]]
| |
| − | === Поняття ===
| |
| − | Пошук з обмеженням глибини (Depth-Limited Search, DLS) – це модифікація пошуку вглибину, яка мінімізує глибину, на яку може йти [[Алгоритм|алгоритм]] пошуку. Крім того, що починається з кореневого та цільового вузлів, передбачається, що алгоритм не спускається нижче певного рівня.
| |
| − | Ця модифікація зберігає [[Алгоритм|алгоритм]] від безкінечних циклів, зупиняючи пошук після попередньо встановленої глибини.
| |
| − |
| |
| − | Хоча [[Алгоритм|алгоритм]] усуває можливість нескінченного циклу у [[Граф|графі]], він також зменшує область пошуку. Якщо цільовий вузол був одним з вузлів із позначкою "X", його не було б знайдено, зробивши [[Алгоритм|алгоритм]] пошуку неповним. [[Алгоритм|алгоритм]] може бути повним, якщо глибина пошуку залежить від самого дерева (у цьому випадку d дорівнює трьом). Техніка також не є оптимальною, оскільки може бути знайдений перший шлях замість найкоротшого.
| |
| − |
| |
| − | Час і простір обмеженого по глибині пошуку аналогічні DFS, з якого виводиться цей [[Алгоритм|алгоритм]]. Складність простору - це O (bd), а складність часу - O (b^d), але в цьому випадку d є глибиною пошуку, а не [[Граф|графа]].
| |
| − |
| |
| − | === Реалізація ===
| |
| − | <nowiki>
| |
| − | #include <stdio.h>
| |
| − | #include “graph.h”
| |
| − | #include “stack.h”
| |
| − | #define A 0
| |
| − | #define B 1
| |
| − | #define C 2
| |
| − | #define D 3
| |
| − | #define E 4
| |
| − | #define F 5
| |
| − | #define G 6
| |
| − | #define H 7
| |
| − | int init_graph( graph_t *g_p )
| |
| − | {
| |
| − | addEdge( g_p, A, B, 1 );
| |
| − | addEdge( g_p, A, C, 1 );
| |
| − | addEdge( g_p, B, D, 1 );
| |
| − | addEdge( g_p, C, E, 1 );
| |
| − | addEdge( g_p, C, F, 1 );
| |
| − | addEdge( g_p, D, G, 1 );
| |
| − | addEdge( g_p, D, H, 1 );
| |
| − | return 0;
| |
| − | }
| |
| − | void dls( graph_t *g_p, int root, int goal, int limit )
| |
| − | {
| |
| − | int node, depth, to;
| |
| − | stack_t *s_p, *sd_p;
| |
| − | s_p = createStack( 10 );
| |
| − | sd_p = createStack( 10 );
| |
| − | pushStack( s_p, root );
| |
| − | pushStack( sd_p, 0 );
| |
| − | while ( !isEmptyStack(s_p) )
| |
| − | {
| |
| − | node = popStack( s_p );
| |
| − | depth = popStack( sd_p );
| |
| − | printf(“%d (depth %d)\n”, node, depth);
| |
| − | if (node == goal) break;
| |
| − | if (depth < limit)
| |
| − | {
| |
| − | for (to = g_p->nodes-1 ; to > 0 ; to--)
| |
| − | {
| |
| − | if (getEdge( g_p, node, to ) )
| |
| − | {
| |
| − | pushStack( s_p, to );
| |
| − | pushStack( sd_p, depth+1 );
| |
| − | }
| |
| − | }
| |
| − | }
| |
| − | }
| |
| − | destroyStack( s_p );
| |
| − | destroyStack( sd_p );
| |
| − | return;
| |
| − | }
| |
| − | int main()
| |
| − | {
| |
| − | graph_t *g_p; g_p = createGraph( 8 );
| |
| − | init_graph( g_p );
| |
| − | dls( g_p, 0, 5, 2 );
| |
| − | destroyGraph( g_p );
| |
| − | return 0;
| |
| − | }
| |
| − |
| |
| − | </nowiki>
| |
| − |
| |
| − | == Пошук з ітеративним заглибленням ==
| |
| − | [[Файл:Iterative_deepening_search_flow.png|300px|thumb|right|Порядок виконання пошуку з ітеративним заглибленням]]
| |
| − | === Поняття ===
| |
| − | Пошук з ітеративним заглибленням (Iterative Deepening Search, IDS) – це похідний від DLS алгоритм, що поєднує в собі особливості пошуку вглибину з та пошуку вширину. IDS працює, виконуючи пошуки DLS із збільшеною глибиною, доки не буде знайдено ціль.
| |
| − | Мінімізуючи глибину пошуку, ми змушуємо [[Алгоритм|алгоритм]] шукати вширину [[Граф|графа]]. Якщо ціль не знайдено, збільшується глибина, яку [[Алгоритм|алгоритму]] дозволено шукати, і він запускається знову.
| |
| − |
| |
| − | IDS є зручним, тому що він не схильний до зациклення (характеристика DLS, на якій вона заснована). Він також знаходить ціль, найближчу до кореневого вузла, як і [[Алгоритм|алгоритм]] BFS (який буде детально описано далі). З цієї причини це найкращий [[Алгоритм|алгоритм]], коли глибина рішення невідома.
| |
| − |
| |
| − | Складність часу для IDS ідентична DFS і DLS, O (b^d). Простір складності IDS - O (bd). Навідмінно від DFS та DLS, IDS завжди знайде найкраще рішення, тому він є повним і оптимальним.
| |
| − |
| |
| − | === Реалізація ===
| |
| − | <nowiki>
| |
| − | #include <stdio.h>
| |
| − | #include “graph.h”
| |
| − | #include “stack.h”
| |
| − | #define A 0
| |
| − | #define B 1
| |
| − | #define C 2
| |
| − | #define D 3
| |
| − | #define E 4
| |
| − | #define F 5
| |
| − | #define G 6
| |
| − | #define H 7
| |
| − | int init_graph( graph_t *g_p )
| |
| − | {
| |
| − | addEdge( g_p, A, B, 1 );
| |
| − | addEdge( g_p, A, C, 1 );
| |
| − | addEdge( g_p, B, D, 1 );
| |
| − | addEdge( g_p, C, E, 1 );
| |
| − | addEdge( g_p, C, F, 1 );
| |
| − | addEdge( g_p, D, G, 1 );
| |
| − | addEdge( g_p, D, H, 1 );
| |
| − | return 0;
| |
| − | }
| |
| − | int dls( graph_t *g_p, int root, int goal, int limit )
| |
| − | {
| |
| − | int node, depth;
| |
| − | int to;
| |
| − | stack_t *s_p, *sd_p;
| |
| − | s_p = createStack( 10 );
| |
| − | sd_p = createStack( 10 );
| |
| − | pushStack( s_p, root );
| |
| − | pushStack( sd_p, 0 );
| |
| − | while ( !isEmptyStack(s_p) )
| |
| − | {
| |
| − | node = popStack( s_p );
| |
| − | depth = popStack( sd_p );
| |
| − | printf(“%d (depth %d)\n”, node, depth);
| |
| − | if (node == goal) return 1;
| |
| − | if (depth < limit)
| |
| − | {
| |
| − | for (to = g_p->nodes-1 ; to > 0 ; to--)
| |
| − | {
| |
| − | if (getEdge( g_p, node, to ) )
| |
| − | {
| |
| − | pushStack( s_p, to );
| |
| − | pushStack( sd_p, depth+1 );
| |
| − | }
| |
| − | }
| |
| − | }
| |
| − | }
| |
| − | destroyStack( s_p );
| |
| − | destroyStack( sd_p );
| |
| − | return 0;
| |
| − | }
| |
| − | int main()
| |
| − | {
| |
| − | graph_t *g_p;
| |
| − | int status, depth;
| |
| − | g_p = createGraph( 8 );
| |
| − | init_graph( g_p );
| |
| − | depth = 1;
| |
| − | while (1)
| |
| − | {
| |
| − | status = dls( g_p, 0, 5, depth );
| |
| − | if (status == 1) break;
| |
| − | else depth++;
| |
| − | }
| |
| | destroyGraph( g_p ); | | destroyGraph( g_p ); |
| | return 0; | | return 0; |
| Рядок 251: |
Рядок 93: |
| | int isEmptyPQueue (pqueue_t *q_p ); | | int isEmptyPQueue (pqueue_t *q_p ); |
| | int isFullPQueue (pqueue_t *q_p );</nowiki> | | int isFullPQueue (pqueue_t *q_p );</nowiki> |
| | + | |
| | + | '''Виконав [[Романів Роман]]''' |
Поточна версія на 01:04, 19 лютого 2018
Пошук вглибину
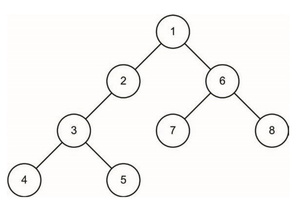
Порядок виконання пошуку вглибину в малому дереві
Поняття
Алгоритм пошуку вглибину (Depth-First Search, DFS) - це метод пошуку графа, який починається з кореневого вузла, і оглядає кожну гілку на найглибшому рівні, перш ніж відслідковувати попередньо нерозвідані гілки. Знайдені, але ще не перевірені вузли зберігаються в черзі LIFO (стек).
Складність простору для DFS - це O (bd), де складність часу геометрична (O (b^d)). Це може бути великою проблемою для глибоких розгалужених графів, оскільки алгоритм буде продовжувати до максимальної глибини графа. Якщо в графі присутні цикли, DFS буде слідувати цим циклам безкінечно. З цієї причини алгоритм DFS не є повним, оскільки цикли можуть не дати алгоритму виявити ціль. Якщо на графі немає циклів, то алгоритм повний (завжди знайде цільовий вузол). Алгоритм DFS не є оптимальним, але може ним стати, за допомогою перевірки шляху (щоб забезпечити найкоротший шлях до мети).
Реалізація
Алгоритми графів можуть бути реалізовані як рекурсивно, так і за допомогою стеків для підтримки списку вузлів, які необхідно перерахувати. У нижче наведеному прикладі алгоритм DFS реалізується за допомогою стека LIFO. Також наведено необхідний допоміжний АРІ.
#include <stdio.h>
#include “graph.h”
#include “stack.h”
#define A 0
#define B 1
#define C 2
#define D 3
#define E 4
#define F 5
#define G 6
#define H 7
int init_graph( graph_t *g_p )
{
addEdge( g_p, A, B, 1 );
addEdge( g_p, A, C, 1 );
addEdge( g_p, B, D, 1 );
addEdge( g_p, C, E, 1 );
addEdge( g_p, C, F, 1 );
addEdge( g_p, D, G, 1 );
addEdge( g_p, D, H, 1 );
return 0;
}
void dfs( graph_t *g_p, int root, int goal )
{
int node;
int to;
stack_t *s_p;
s_p = createStack( 10 );
pushStack( s_p, root );
while ( !isEmptyStack(s_p) )
{
node = popStack( s_p );
printf(“%d\n”, node);
if (node == goal) break;
for (to = g_p->nodes-1 ; to > 0 ; to--)
{
if (getEdge( g_p, node, to ) )
{
pushStack( s_p, to );
}
}
}
destroyStack( s_p );
return;
}
int main()
{
graph_t *g_p;
g_p = createGraph( 8 );
init_graph( g_p );
dfs( g_p, 0, 5 );
destroyGraph( g_p );
return 0;
}
Допоміжний АРІ
Для демонстрації алгоритмів пошуку необхідний допоміжний АРІ, що включає перелічені функції:
/* Graph API */
graph_t *createGraph (int nodes );
void destroyGraph (graph_t *g_p );
void addEdge (graph_t *g_p, int from, int to, int value );
int getEdge (graph_t *g_p, int from, int to );
/* Stack API */
stack_t *createStack (int depth );
void destroyStack (stack_t *s_p );
void pushStack (stack_t *s_p, int value );
int popStack (stack_t *s_p );
int isEmptyStack (stack_t *s_p );
/* Queue API */
queue_t *createQueue (int depth );
void destroyQueue (queue_t *q_p );
void enQueue (queue_t *q_p, int value );
int deQueue (queue_t *q_p );
int isEmptyQueue (queue_t *q_p );
/* Priority Queue API */
pqueue_t *createPQueue (int depth );
void destroyPQueue (pqueue_t *q_p );
void enPQueue (pqueue_t *q_p, int value, int cost );
void dePQueue (pqueue_t *q_p, int *value, int *cost );
int isEmptyPQueue (pqueue_t *q_p );
int isFullPQueue (pqueue_t *q_p );
Виконав Романів Роман
Developed by
Інститут Програмних Систем